






2023/11/10
669
协作机器人与一般工业机器人的区别 - 广州国际金属加工工业展览会
2024年广州国际金属加工工业展览会即将于2024年3月4-6日在中国进出口商品交易会展馆B区举行。邀您关注今日新资讯:
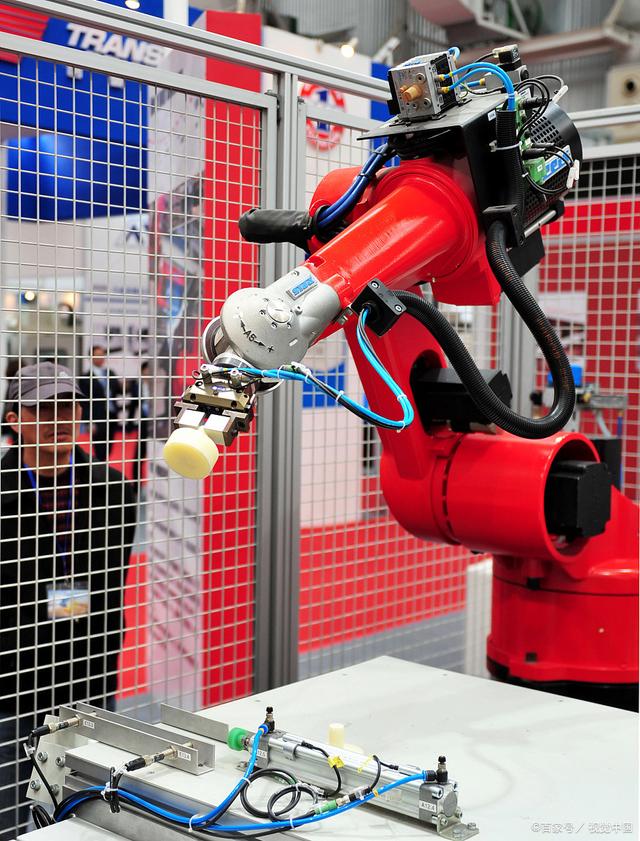
关节型工业机器人,以4轴6轴居多,一般工业机器人以其高度柔性生产适应能力和低故障率的特点,在点焊、装配、码垛等工业生产领域得到广泛应用。作为关节型工业机器人的最新分支,协作机器人与一般工业机器人外观差别不大,具有一般工业机器人相似的机械结构和控制方式,它们的区别主要集中在以下几个方面:
 工业机器人
工业机器人一、机械结构:
4轴工业机器人通常由4个关节组成,6轴工业机器人通常由6个关节组成,每个关节可以单独控制,从而实现多个自由度的运动。而协作机器人的结构更加灵活多样,可以是多关节或者软体结构,具有更高的适应性和灵敏性。
二、控制方式:
4轴或6轴工业机器人通常以预编程的方式进行控制,即事先编写好程序指令,机器人按照指令执行任务。而协作机器人可以根据环境的变化和人机交互的需要实时调整运动轨迹和力量,更加灵活多变。
三、负载能力
协作机器人和一般工业机器人最大不同在于,机械结构上每轴都由力矩传感器与上一级连接。所以协作机器人每轴刚性较低、负载能力较小,协作机器人最大负载能力在20kg左右,而一般工业机器人的负载能力在2000kg以内。
 协作机器人
协作机器人四、作业范围
由于协作机器人由力矩检测逐级连接,为保证轴的刚性臂展较短,作业范围有限。无论是4轴还是6轴协作机器人都比同类型一般工业机器人作业范围小。
五、安全性
协作机器人通常采用传感器和智能算法来检测人的存在和意图,并调整自身行为来保证人机安全合作。而6轴工业机器人一般需要通过固定护栏或其它屏障与人进行分隔,以确保操作人员的安全。
协作机器人具备更高的安全性能,可以与人类操作员共同工作而不会对其造成伤害。这也是“协作机器人”名字中“协作”一词的由来。
 工业机器人
工业机器人文章来源:百度
2024年广州国际金属加工工业展览会即将于2024年3月4-6日在中国进出口商品交易会展馆B区举行;展会更多资讯,详情请登陆官网 https://asiametal.gymf.com.cn
| 凡本网注明“来源:广州光亚法兰克福展览有限公司”的所有作品,版权均属于广州光亚法兰克福展览有限公司,转载请注明。 凡注明为其它来源的信息,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点及对其真实性负责。若作者对转载有任何异议,请联络本网站,联系方式:020-38217916;我们将及时予以更正。 |

致力打造亚洲金属加工技术装备市场的优质平台
欢迎莅临广州国际金属加工工业展览会!
主办单位官方微信

